Exoskeleton Leg
01/02/23
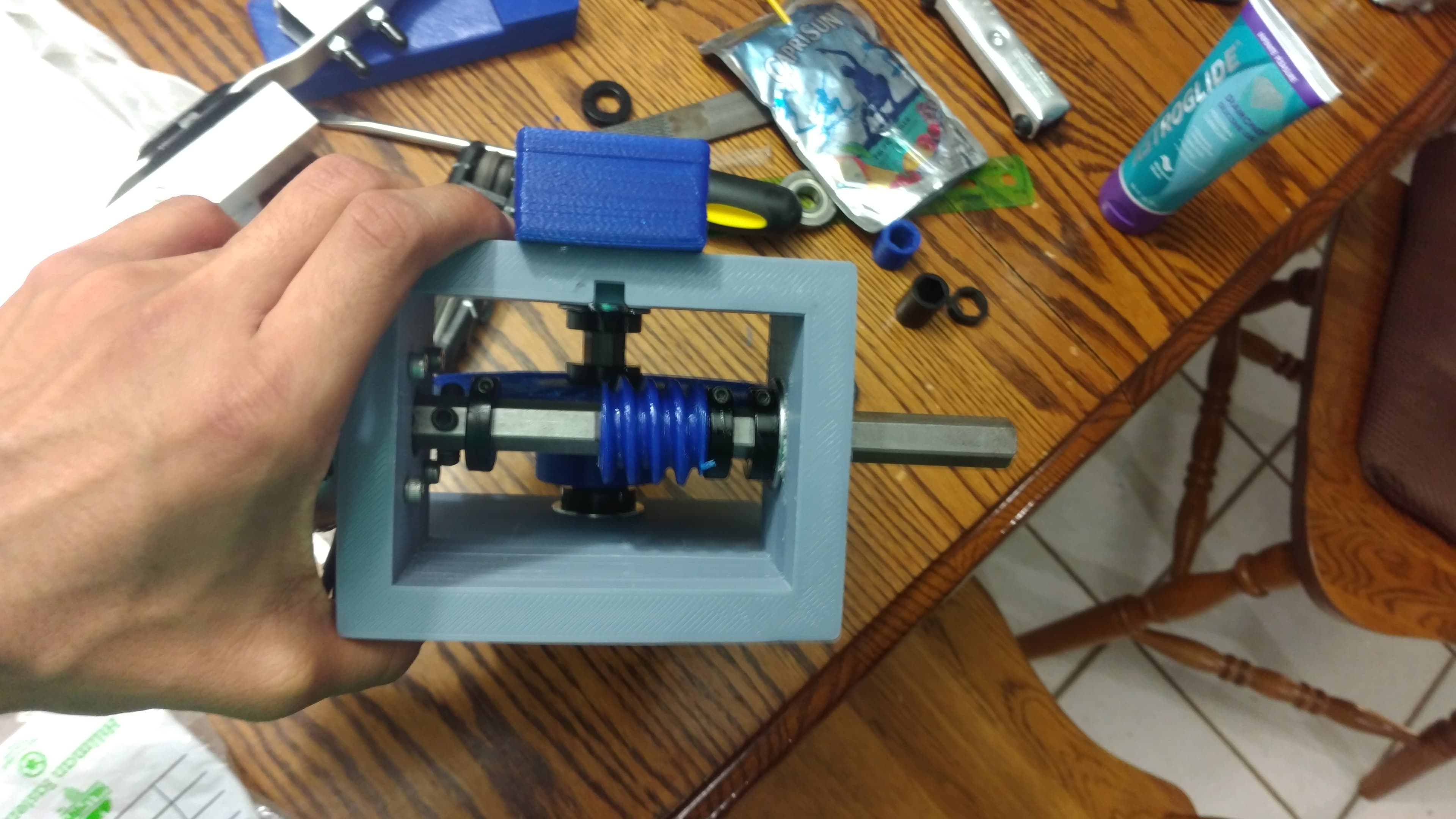
This exoskeleton leg protoype was constructed with the goal of aiding in physical rehabilitation. The design was focused towards patients who suffered from muscular dystrophy due to injury. The joint was actuated using a custom gear set specifically designed to apply the greatest torque. Control of the system was handled by a brushless motor, motor controller, arduino and potentiometer. Many issues were encountered in the development of this device. Foremost, without access to custom cut gears, we relied on a 3D printing. As expected, the plastic gears failed catostrophically time and time again.
Gallery




